Consecutive work
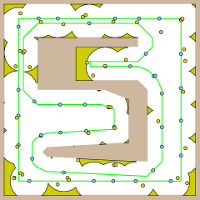
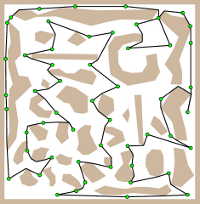
Ongoing effort based on the thesis work mainly concerns the proposed multi-goal path planning method based on the self-organizing map.
The adaptation algorithm has been improved in the solutions quality and also in the required computational time aspects [4].
The speedup is in an order of magnitude while the solutions quality is preserved or improved.
The largest multi-goal path planning problem formulated as the traveling salesman problem presented in the thesis is solved one hundred times faster by the new version of the algorithm.
The additional work is in generalization of the algorithm, which is now able to solve problems with polygonal goals [5, 6].
This effort leads to a unified approach to solve various multi-goal path planning problems.
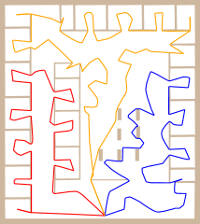
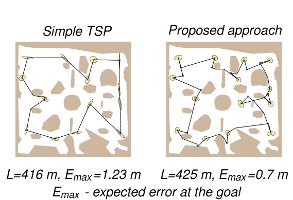
Moreover, partial results on consideration of localization uncertainties in the path planning have been achieved.
Incorporating a mathematical model of the navigation method [7] to the self-organizing adaptation procedure provides more reliable paths for autonomous navigation.
The preliminary results of the new planning method for surveillance task with a simple quad-rotor helicopter are presented in [8].
Regarding the experimental results, the planned paths increase reliability of the seen goals during the autonomous surveillance patrolling up to 95%.
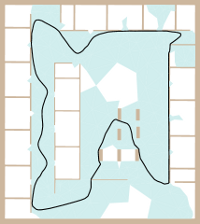
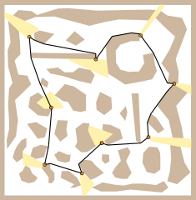
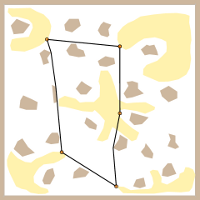
Similar work has been done for a ground mobile robot (P3AT), for which the proposed approach finds a path leading to more precise navigation (about 20%) in real outdoor environment [9].
Finally, the approach initiated in the thesis seems to provide a framework for solving various inspection tasks with discrete/continuous sensing models, point/polygonal goals, several robots and models of localization uncertainties.
A comprehensive overview of further research directions based on the thesis work is presented in Section 9.2.
| Selected publications: |
|
[1]
Jan Faigl, M. Kulich, and L. Přeučil.
A sensor placement algorithm for a mobile robot inspection planning.
Journal of Intelligent & Robotic Systems, 62(3-4):329-353 2011.
doi: 10.1007/s10846-010-9449-0.
|
|
[2]
Jan Faigl, M. Kulich, V. Vonásek, and L. Přeučil.
An Application of Self-Organizing Map in the non-Euclidean Traveling Salesman Problem.
Neurocomputing 74:671-679, 2011.
doi: 10.1016/j.neucom.2010.08.026.
|
|
[3]
Jan Faigl.
Approximate Solution of the Multiple Watchman Routes Problem with Restricted Visibility Range.
IEEE Transactions on Neural Networks, 21(10):1668-1679, 2010.
doi: 10.1109/TNN.2010.2070518
|
|
[4]
Jan Faigl.
On the Performance of Self-Organizing Maps for the non-Euclidean Traveling Salesman Problem in the Polygonal Domain.
Information Sciences, 181(19):4214-4229, 2011.
doi: 10.1016/j.ins.2011.05.019
|
|
[5]
Jan Faigl, L. Přeučil.
Self-Organizing Map for the Multi-Goal Path Planning with Polygonal Goals.
In T. Honkela et al. (Eds.): ICANN 2011, Part I, LNCS 6791, 85-92, 2011.
|
|
[6]
Jan Faigl, V. Vonásek, and L. Přeučil.
A Multi-Goal Path Planning for Goal Regions in the Polygonal Domain
In Proceedings of the 5th European Conference on Mobile Robots. 171-176, 2011.
|
|
[7]
T. Krajník, Jan Faigl, V. Vonásek, K. Košnar, M. Kulich, and L. Přeučil.
Simple yet stable bearing-only navigation. Journal of Field Robotics, 27(5):511-533, 2010,
doi: 10.1002/rob.20354
[pdf].
|
|
[8]
Jan Faigl, T. Krajník, V. Vonásek, and L. Přeučil.
Surveillance Planning with Localization Uncertainty for UAVs.
In 3rd Israeli Conference on Robotics, Ariel, 2010, [pdf].
|
|
[9]
Jan Faigl, T. Krajník, V. Vonásek, and L. Přeučil.
On Localization Uncertainty in an Autonomous Inspection.
ICRA, 1119-1124, 2012.
|
|
|
Videos
|