| Research: |
mobile robotics, multi-goal planning, path and motion planning, computational geometry, optimal sampling design, multi-robot systems, autonomous field navigation;
in general, topics related to a robotic system for autonomous long-term environment monitoring
Current activities and projects:
- Situation Awareness Sharing in Human-Machine Interaction using Resilient Communication in Robotics Telemetry, Ministry of Education Youth and Sports (MEYS) project No. LUABA24064 (2024-2026)
- Robotics and advanced industrial production (OP JAK ROBOPROX), Ministry of Education Youth and Sports (MEYS) project No. CZ.02.01.01/00/22_008/0004590 (2023-2028)
- Center for advanced machines and manufacturing technology, National Centres of Competence (NCK CAMAT), Technology Agency of Czech Republic, TAČR, Project No. TN02000028 (2023-2028)
- Automated system for critical infrastructure protection using cyber-physical technologies, Ministry of the Interior of the Czech Republic, Project No. VK01030216 (2023-2025)
Recent activities:
- Towards Optimal Solution of Robotic Routing Problems, Czech Science Foundation (GA ČR), Project No. 22-05762S. (2022-2024)
- Risk-Aware Trajectory Planning and Optical Image Recognition Assisted Landing System for FixedWing UAVs, Technology Agency of the Czech Republic (TA ČR), Project No. TM03000046. (2022-2024)
- Learning Complex Motion Planning Policies, Czech Science Foundation (GA ČR), Project No. 21- 33041J; a joint project with J. Baltes, National Taiwan Normal University, Taiwan.
- Towards Optimal Curvature-Constrained Tours in Robotic Applications, Ministry of Education Youth and Sports (MEYS) project No. LTAIZ19013; a joint project with Oren Salzman, Technion, Israel (2019-2022)
- Multi-Robot Persistent Monitoring of Dynamic Environments, Czech Science Foundation (GA ČR) project No. GA19-20238S (2019-2021)
- Hybrid navigation system for autonomous vehicles in environment with denied GNSS services, Technology Agency of the Czech Republic (TA ČR) project No. TH03010362 (2018-2020)
- Robotic Lifelong Learning of Multi-legged Robot Locomotion Control in Autonomous Data Collection Missions, Czech Science Foundation (GA ČR) project No. GA18-18858S (2018-2020)
Past activities:
- Invited talk at the 2018 3rd International Conference on Automation, Control and Robotics Engineering (CACRE), July 19-22, 2018, Chengdu, China on the topic Recent Progress in Information Gathering and Surveillance Missions Planning with Unmanned Aerial Vehicles, slides
- Efficient Information Gathering with Dubins Vehicles in Persistent Monitoring and Surveillance Missions, Czech Science Foundation (GA ČR), project No. GA16-24206S (2016-2018)
- Adaptive Informative Path Planning in Autonomous Data Collection in Dynamic Unstructured Environments, Czech Science Foundation (GA ČR), project No. 15-09600Y (2015-2017)
- Visual Navigation for Hexapod Walking Robots in Autonomous Data Collection Tasks a joint project with the University of Buenos Aires
- Workshop on On-line Decision-Making in Multi-Robot Coordination within the RSS 2016
- Self-Organizing Maps for Multi-Goal Path Planning Tasks, Czech Science Foundation (GA ČR), project No. 13-18316P (2013-2015)
-
Multi-Agent Coordination in Robotic Exploration and Reconnaissance Missions -- a joint project with the
CITY-Lab a laboratory associated to
INSA Lyon and INRIA.
- Workshop on On-line Decision-Making in Multi-Robot Coordination within the IROS 2015
- Workshop on Multi-Agent Coordination in Robotic Exploration within the 21st European Conference on Artificial Intelligence (ECAI'14')
- Fulbright Visiting Scholar at the University of Southern California (USC), Robotic Embedded System Laboratory working on the topic Planning in Spatio-Temporal Spaces (10/2013-04/2014)
|
| Awards: |
- New! 2023 - The Unmanned Ground Systems Autonomy Trials (UGV-AT), Läsna, Estonia
- New! 2022 - V4 - Innovation Challenge Day 2022 “Military Autonomous Systems”
- 2021 - IT SPY – best master thesis in the field of informatics and information technology in Czechia and Slovakia for the supervised master student J. Deckerová
- 2021 - DARPA SubT Challenge Finals - 2nd place in virtual competition
- 2021 - Amazon Research Award for the project Communication maps building in subterranean environments
- 2020 - AI Awards 2019, Best project of the year 2019, Czechia
- 2020 - DARPA SubT Challenge - 3rd place in Urban Circuit, Elma, Washington, USA
- 2019 - DARPA SubT Challenge -- 3rd place in Tunnel Circuit (August, Pittsburgh, USA) memebers of the CTU-CRAS team
- 2019 - WSOM+ 2019 Best Student Paper, Barcelona, Spain for the paper Rudolf Szadkowski, Jan Drchal, and Jan Faigl: Autoencoders Covering Space as a Life-Long Classifier
- 2019 - IT SPY – best master thesis in the field of informatics and information technology in Czechia and Slovakia for the supervised master student J. Bayer
- 2018 - RSS 2018 Best Student Paper Finalist, Pittsburgh, Pennsylvania, USA for the paper Petr Váňa, Jan Faigl: Optimal Solution of the Generalized Dubins Interval Problem
- 2017 - IJCNN 2017 Best Poster Honorable Mention, Anchorage, Alaska, USA for the paper On Self-Organizing Maps for Orienteering Problems
- 2017 - Winner team of Challenge No. 3 in Mohamed Bin Zayed International Robotics Challenge (MBZIRC), Abu Dhabi, UAE
- 2016 - Best poster award for the 11th Workshop on Self-Organizing Maps 2016.
- 2016 - Finalist for the IROS 2016 RoboCup Best Paper Award, Deajeon, Korea
- 2015 - Best student paper award for Jakub Mrva, a phd student supervised by me, for paper Feature Extraction for Terrain Classification with Crawling Robots ITAT 2015
- 2014 - Best poster award for the 10th Workshop on Self-Organizing Maps 2014.
- 2013 - Dean award for an exceptional bachelor thesis of Diar Masri, a bachelor student supervised by me, on a topic Motion Model of Stair Climbing in Hexapod Walking Robot (info).
- 2013 - Dean award for an exceptional master thesis of Lenka Mudrová, a master student supervised by me, on a topic Entropy-Like Estimation Technique in Mobile Robot Localization (info).
- 2013 - Fulbright scholarship award for a visiting position at University of Southern California, Los Angeles in 2013/2014.
- 2011 - Antonin Svoboda prize for the best PhD dissertation in the Czech Republic - Czech Society for Cybernetics and Informatics.
- 2010 - Best Paper Award for the Symposium Theory and Applications of Artificial Intelligence (20th European Meetings on Cybernetics and Systems Research).
- 2009 - 1st place in RoboTour outdoor delivery challenge.
- 2009 - Dean award for an exceptional master thesis of Jan Mačák, a master student supervised by me, on a topic Multi-Robot Cooperative Inspection Task (info).
- 2008 - 1st place in RoboTour outdoor delivery challenge
- 2008 - Dean award for an exceptional master thesis of Vojtěch Vonásek, a master student supervised by me, on a topic Trajectory Generation for Cooperative Inspection Task.
- 2007 - 3rd place in RoboTour outdoor delivery challenge.
- 2006 - 3rd place in RoboTour outdoor delivery challenge.
|
|
| 2016 |
|
Premysl Kafka, Jan Faigl, Petr Vana
Random Inspection Tree Algorithm in Visual Inspection with a Realistic Sensing Model and Differential Constraint
ICRA 2016, pp. 2782-2787.
|
|
Martin Stejskal, Jakub Mrva, Jan Faigl
Road Following with Blind Crawling Robot
ICRA 2016, pp. 3612-3617.
|
|
Petr Cizek, Jan Faigl
Low-latency Image Processing for Vision-based Navigation Systems
ICRA 2016, pp. 781-786.
|
|
Jan Faigl
On Self-Organizing Map and Rapidly-Exploring Random Graph in Multi-Goal Planning
Advances in Self-Organizing Maps and Learning Vector Quantization, 2016, pp. 143-153.
|
| 2015 |
|
Alejandro Vázquez-Otero, Jan Faigl, Raquel Dormido, Natividad Duro
Reaction Diffusion Voronoi Diagrams: From Sensors Data to Computing
Sensors 15(6):12736-12765, 2015.
|
|
Petr Vana, Jan Faigl
On the Dubins Traveling Salesman Problem with Neighborhoods
IROS 2015, pp. 4029-4034.
|
|
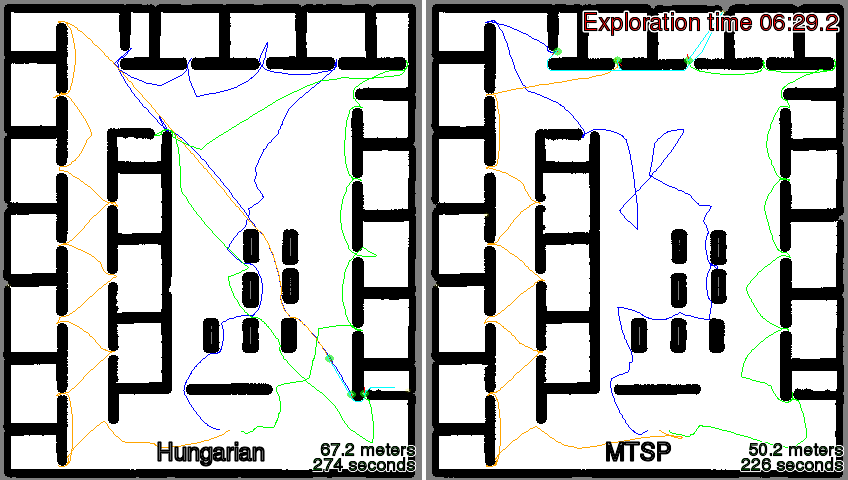
Jan Faigl, Miroslav Kulich
On benchmarking of frontier-based multi-robot exploration strategies
ECMR 2015.
|
|
Jakub Mrva, Jan Faigl
Feature Extraction for Terrain Classification with Crawling Robots
ITAT 2015, pp.179-185.
|
|
Jakub Mrva, Jan Faigl
Tactile sensing with servo drives feedback only for blind hexapod walking robot
RoMoCo 2015, pp. 240-245.
|
| 2014 |
|
Jan Faigl, Geoffrey A. Hollinger
Unifying multi-goal path planning for autonomous data collection.
IROS 2014, pp. 2937-2942.
|
|
Petr Vaněk, Jan Faigl, Diar Masri
Multi-goal Trajectory Planning with Motion Primitives for Hexapod Walking Robot.
ICINCO(2) 2014, pp. 599-604.
|
|
Tomáš Krajník, Matias Nitsche, Jan Faigl, Petr Vaněk, Martin Saska, Tom Duckett, Libor Přeučil, Marta Mejail.
A practical multirobot localization system.
Journal of Intelligent and Robotic Systems (accepted).
|
|
Jan Faigl, Petr Vaněk, Miroslav Kulich.
Self-organizing map for determination of goal candidates in mobile robot exploration.
ESANN 2014
|
|
Jan Faigl, Geoffrey A. Hollinger.
Self-Organizing Map for the Prize-Collecting Traveling Salesman Problem.
WSOM 2014, pp. 281-291 (best poster award)
|
|
Alejandro Vázquez-Otero, Jan Faigl, Natividad Duro, Raquel Dormido.
Reaction-Diffusion based Computational Model for Autonomous Mobile Robot Exploration of Unknown Environments.
International Journal of Unconventional Computing 10(4):295-316, 2014.
|
| 2010-2013 |

|
Petr Janoušek, Jan Faigl
Speeding up coverage queries in 3d multi-goal path planning.
ICRA, 2013, pp. 5067-5072.
|
|
Jan Faigl, Tomáš Krajník, Jan Chudoba, Libor Přeučil, Martin Saska.
Low-cost embedded system for relative localization in robotic swarms.
ICRA, 2013, pp. 985-990.
|
|
Jan Faigl, Miroslav Kulich.
On Determination of Goal Candidates in Frontier-Based Multi-Robot Exploration.
European Conference on Mobile Robots (ECMR), 2013, pp. 210-215.
|

|
Miroslav Kulich, Jan Chudoba, Karel Košnar, Tomáš Krajník, Jan Faigl, Libor Přeučil.
SyRoTek - Distance Teaching of Mobile Robotics.
IEEE Trans. Education 56(1):18-23, 2013.
|
|
Jan Faigl, T. Krajník, V. Vonásek, and L. Přeučil.
On Localization Uncertainty in an Autonomous Inspection.
ICRA, 1119-1124, 2012.
|
|
Jan Faigl, Miroslav Kulich, Libor Přeučil.
Goal assignment using distance cost in multi-robot exploration.
IROS, 3741-3746, 2012.
|

|
Martin Saska, Tomáš Krajník, Jan Faigl, Vojtěch Vonásek, Libor Přeučil.
Low cost MAV platform AR-drone in experimental verifications of methods for vision based autonomous navigation.
IROS, 4808-4809, 2012.
|
|
Alejandro Vázquez-Otero, Jan Faigl, Alberto P. Munuzuri.
Path planning based on reaction-diffusion process.
IROS, 896-901, 2012.
|
|
Jan Faigl, Miroslav Kulich, and Libor Přeučil.
A sensor placement algorithm for a mobile robot inspection planning.
Journal of Intelligent & Robotic Systems, 62(3-4):329-353 2011.
doi: 10.1007/s10846-010-9449-0.
|
|
Jan Faigl, Miroslav Kulich, Vojtěch Vonásek, and Libor Přeučil.
An Application of Self-Organizing Map in the non-Euclidean Traveling Salesman Problem.
Neurocomputing 74:671-679, 2011.
doi: 10.1016/j.neucom.2010.08.026.
|
|
Jan Faigl.
Approximate Solution of the Multiple Watchman Routes Problem with Restricted Visibility Range.
IEEE Transactions on Neural Networks, 21(10):1668-1679, 2010.
doi: 10.1109/TNN.2010.2070518
|

|
Jan Faigl, Vojtěch Vonásek, and Libor Přeučil.
A Multi-Goal Path Planning for Goal Regions in the Polygonal Domain
In Proceedings of the 5th European Conference on Mobile Robots. 171-176, 2011.
|

|
T. Krajník, Jan Faigl, V. Vonásek, K. Košnar, M. Kulich, and L. Přeučil.
Simple yet stable bearing-only navigation
Journal of Field Robotics, 27(5):511-533, 2010,
doi: 10.1002/rob.20354
[pdf].
|
|
Jan Faigl, T. Krajník, V. Vonásek, and L. Přeučil.
Surveillance Planning with Localization Uncertainty for UAVs.
In 3rd Israeli Conference on Robotics, Ariel, 2010, [pdf].
|
|
Jan Faigl.
On the Performance of Self-Organizing Maps for the non-Euclidean Traveling Salesman Problem in the Polygonal Domain.
Information Sciences, 181(19):4214-4229, 2011.
doi: 10.1016/j.ins.2011.05.019
|
|
Jan Faigl, Libor Přeučil.
Self-Organizing Map for the Multi-Goal Path Planning with Polygonal Goals.
In T. Honkela et al. (Eds.): ICANN 2011, Part I, LNCS 6791, 85-92, 2011.
|
|

