Spot during a Garbage collector experiment.

Spot, Hebi hexapod, A1 Unitree preparing to testing in cavern Byci skala
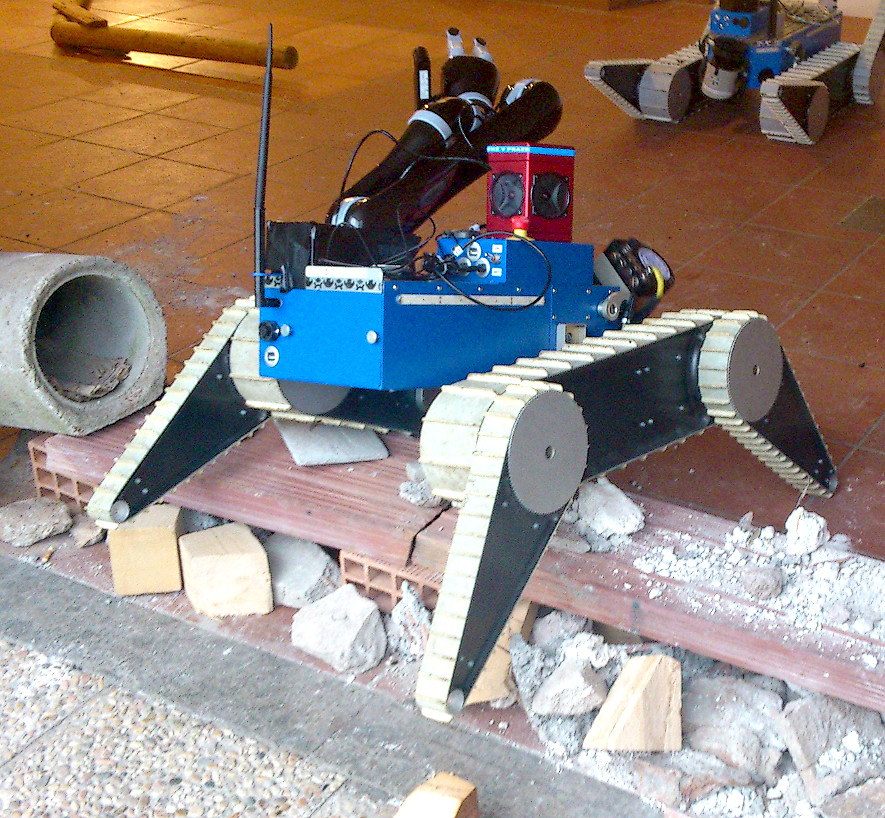
High performace USAR robot called MARV. It can equipped with an arm. Made by JettyVision.



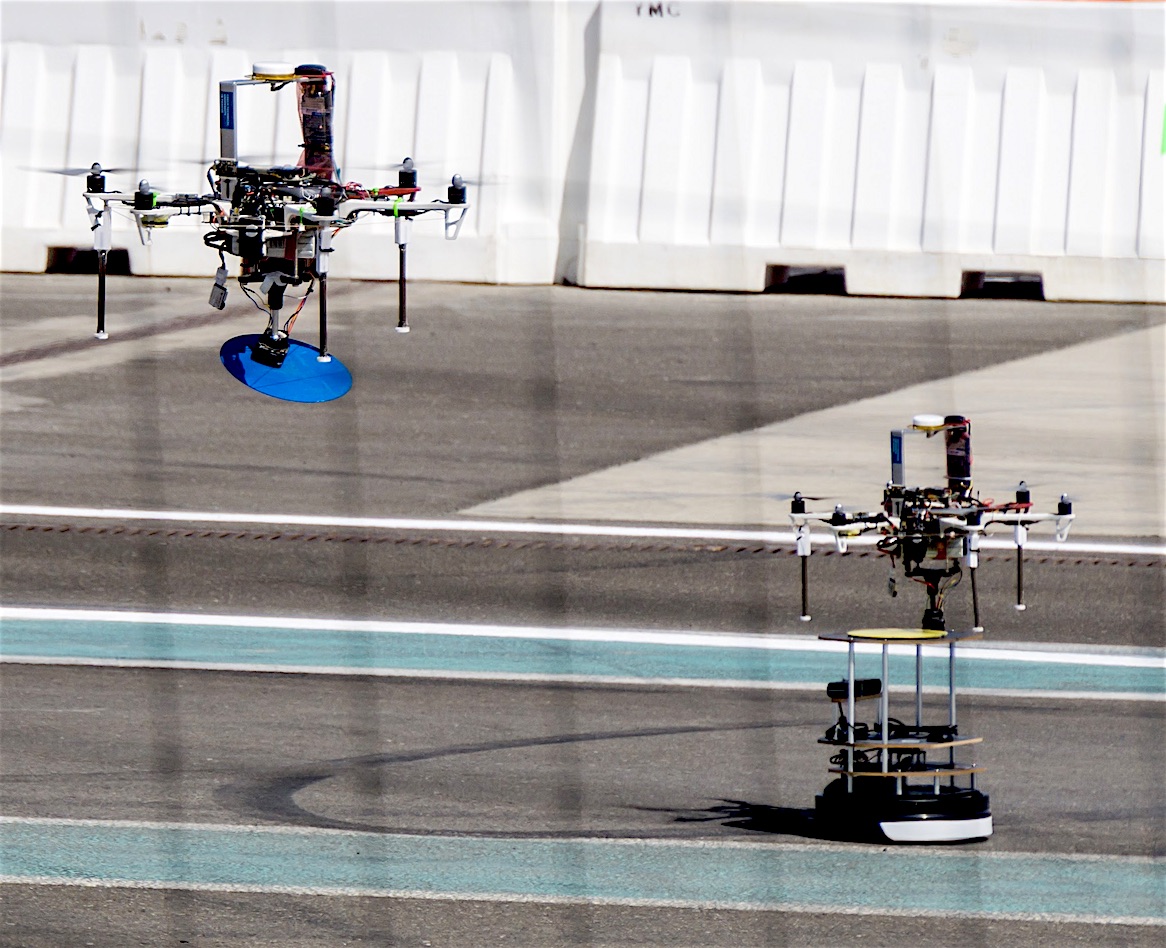
UAVs collecting treasure during the MBZIRC 2017 competition

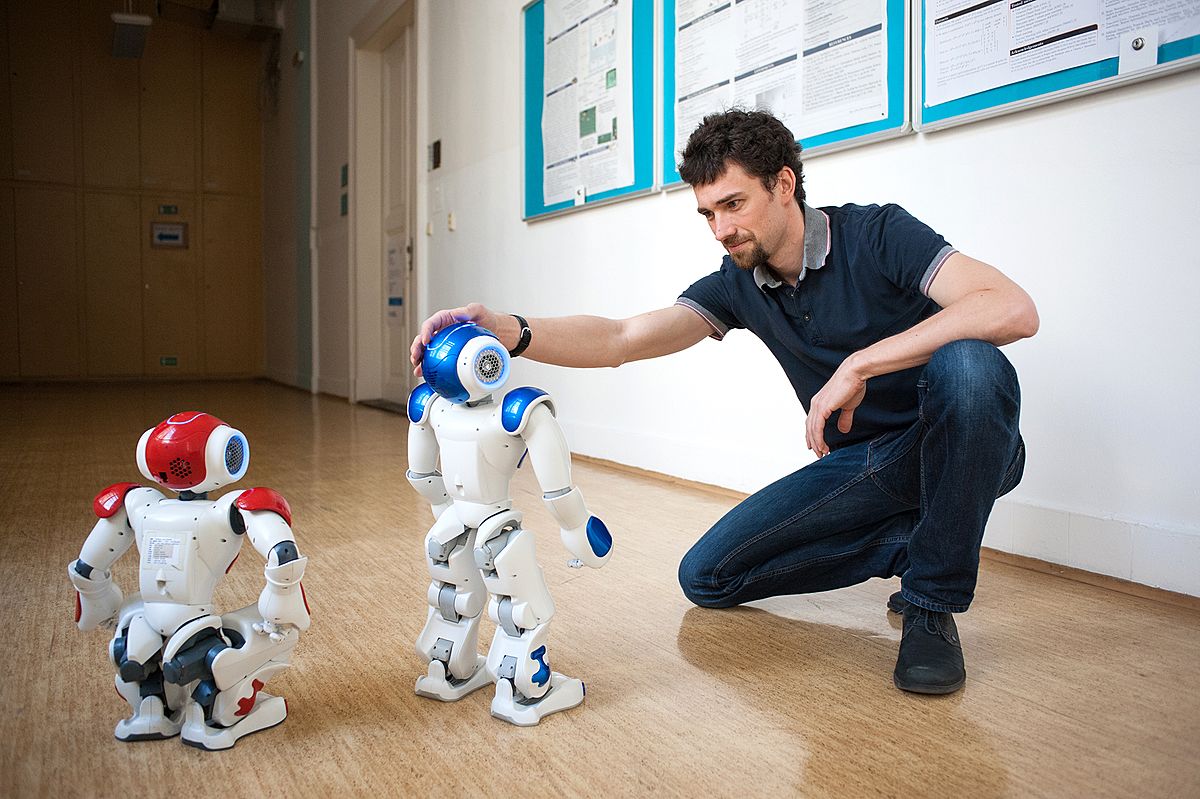
Nao robots and Matej Hoffmann

Two Naos. On right: Nao with tactile sensors, robotic skin removed
In close collaboration with Robot Perception group at CIIRC (project TRADR)