Android app to allow people to share real-time information about density of crowd in different places. The Application recommends a suitable time to visit a shop, park or other public places, on the basis of past concentration of people there. The application leverages our robotic research dedicated to long-term autonomy.
T. Krajnik at Science Cafe, April 16.
Category Archives: News
Robots helping in Covid-19 diagnosis
Member or CRAS are helping in automating Coronavirus detection by developing a methodology that involves robots.

DARPA Subterranean Challenge
Qualified to STIX
Our team qualified to the STIX event of DARPA SubTerranean Challenge. We plan to go to all phases of the system track.
A mapping and detection run:
Karel Zimmermann, associate professor
Karel Zimmermann successfully defended his habilitation thesis if front of the scientific council of the Faculty on May 10, and became Associate Professor.

MBZIRC robotic challenge victory
Our team (also Uni Lincoln and UPenn involved) led by Martin Saska won the Mohamed Bin Zayed International Robotic Challenge (MBZIRC) – Challenge 3 that required a team of UAVs to collaborate to search, locate, track, pick and place a set of static and moving objects. The team also took 2nd place in Challenge 1 – landing on a moving platform and 3rd in the Grand Challenge – after joining University of Padua.
A more detailed story in Czech; with more photos. Czech TV news

Our robots helps with mapping of historical monuments
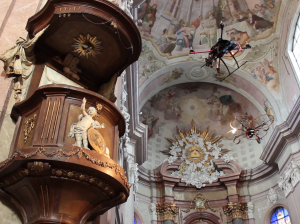 Scanning of historical buildings with inaccessible areas is difficult task for archaeologists and restorers. Members of CRAS from Multi-robot Systems group (MRS) help with scanning of such inaccessible areas using their own drones. Nowadays we negotiate with other heritage institutions to scan other historical buildings. Report about scanning taken by Czech Television (only in czech language). |
Participation in Mohamed Bin Zayed International Robotics Challenge
Team of Czech Technical University in Prague, University of Pennsylvania and University of Lincoln, where members of CRAS play key roles, has been selected for gaining sponsorship for participating in the Mohamed Bin Zayed International Robotics Challenge (MBZIRC) out of 143 applicants from the most prestigious universities in the world. The international team, which is led by Martin Saska, will compete with the worldwide best universities in the field of Micro Aerial Vehicles (MAV) in two Challenges. The first is to autonomously localize a moving vehicle in the arena by a single MAV and then land on a landing platform carried by the vehicle. The second Challenge is to search the arena for various static and moving color objects, then pick them and move them to dedicated area. For more information about our participation in MBZIRC see sites of Multi-Robot Systems group.
CRAS established
The Centre for Robotics and Autonomous Systems was established in April 2015 by researchers from Department of Cybernetics and Department of Computer Science.